")
")
Nowatorskim podejściem do badania wydm marsjańskich jest Valles Marineris Explorer – w skrócie VaMEx. VaMEx to projekt Niemieckiej Agencji Kosmicznej w Niemieckim Centrum Lotnictwa i Kosmonautyki (DLR). Celem inicjatywy jest zaprojektowanie autonomicznego, heterogenicznego roju robotów do badania Valles Marineris na Marsie – zwanego „Wielkim Kanionem” na Czerwonej Planecie.
Valles Marineris to ogromny system dolin ryftowych Mars że naukowcy chcą przeszukać ślady ciekłej wody, która może istnieć w osłoniętych niszach i służyć jako siedlisko potencjalnego życia. Ale region ten jest trudny do zbadania ze względu na swoją topografięco stwarza wyzwania dla pomiarów robotycznych.
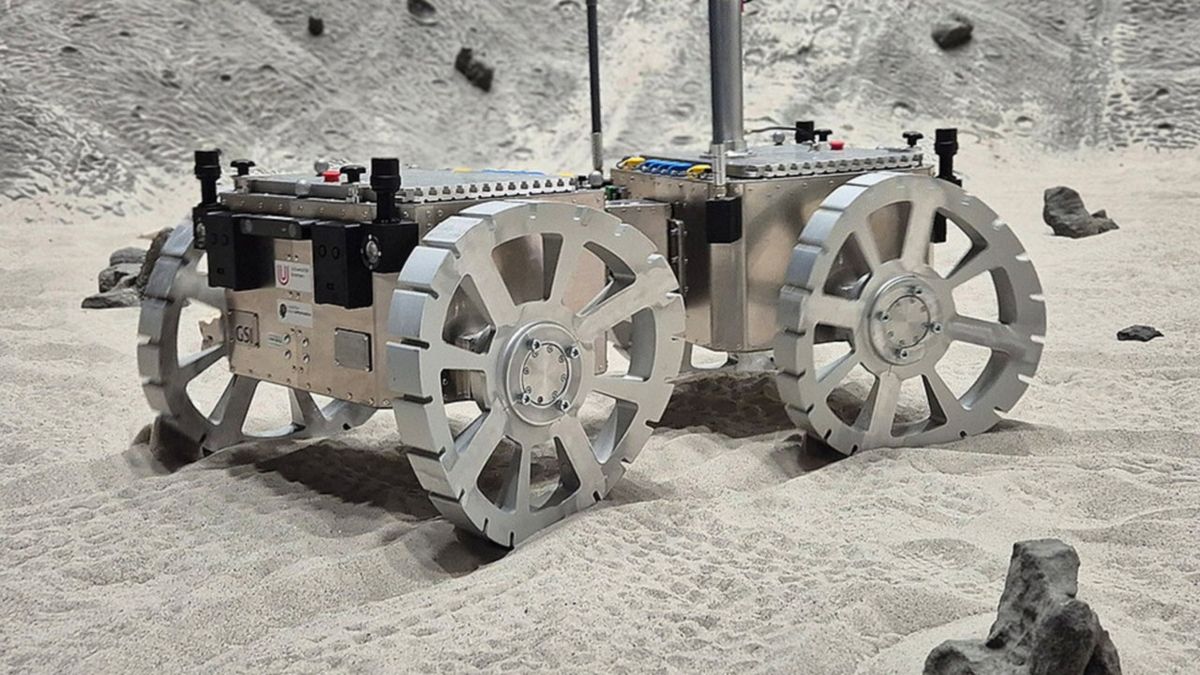
Zespół VaMEx bada jednak kombinacje systemów prowadzenia pojazdu, chodzenia i latania, aby wykorzystać to, co wnosi każda koncepcja, do wspólnego badania dużego obszaru o zróżnicowanej charakterystyce środowiskowej. Jednym z unikalnych rozwiązań, nad którym pracuje zespół, jest łazik marsjański wyposażony w pomysłowe zakrzywione koła, które niczym stopy pustynnej jaszczurki mogą „pływać” po piasku.
Grupa badawcza z Uniwersytetu w Würzburgu zbadała sposób poruszania się sandfisha, adaptując go i adaptując do łazika marsjańskiego, który podobno przewyższa inne sposoby poruszania się po piasku.
Współpracując z badaczami DLR w Bremie w Niemczech, specjaliści z Uniwersytetu w Würzburgu zaprojektowali koła łazika, które imitują charakterystykę mobilności sandfish i interakcję z podłożem, generując zarówno siły wzdłużne, jak i boczne. Ruch ten pozostawia na piasku sinusoidalne ślady lub ślady w kształcie litery S.
Inspirowane biologią
Maszyny Mars muszą radzić sobie z piaskiem, żwirem, zboczami i ogólnie nierównym terenem, zachowując jednocześnie mobilność, stabilność i wydajność.
Marco Schmidt, informatyk uniwersytecki i kierownik Katedry Systemów Wbudowanych i Czujników Obserwacji Ziemi (ESSEO), kieruje badaniami nad mobilnością inspirowaną biologią.
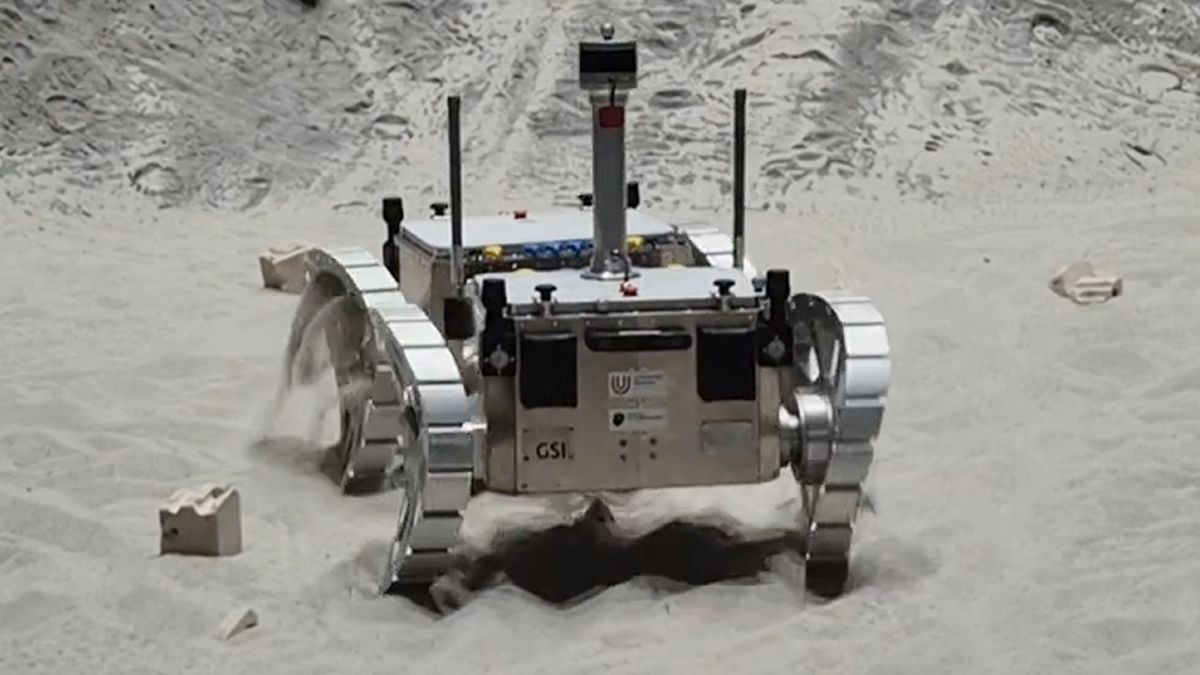
Zespół Schmidta testował łazik na piasku i w otwartym terenie, współpracując z Niemieckim Centrum Badawczym Sztucznej Inteligencji w Bremie i Uniwersytetem w Bremie.
Wyniki wykazały, że pojazd porusza się stabilnie po piasku, jednak eksperymenty wykazały również wyraźne wskazania do ulepszeń, mówi Schmidt.
Pomysł lokomocji sandfish został przejęty z Skink, Skinkjaszczurka znaleziona na Saharze, która potrafi zakopać się w norze, a następnie dosłownie „pływać” w pustynnym piasku, aby polować lub uciekać przed drapieżnikami.
Rozwiązania mobilne
Na uniwersytecie trwają prace nad techniką mobilności i przewiduje się, że dalsze udoskonalenia poprawią wydajność na mieszanym terenie. Zespół ESSEO zamierza rozszerzyć swój wkład w VaMEx w kierunku mobilności opartej na oprogramowaniu.
Plany badawcze wymagają również opracowania strategii kontroli, które wyraźnie uwzględniają poślizg, opadanie i interakcję między terenem a kołem. Rezultatem byłoby bardziej stabilne i elastyczne zachowanie łazika w środowiskach ziarnistych.
„Tworzenie rozwiązań mobilnych, które będą mogły niezawodnie i wydajnie poruszać się po rozległych polach wydmowych na Marsie, nie tylko w Valles Marineris, ale na całej planecie, ma kluczowe znaczenie dla przyszłej eksploracji Marsa, zarówno z wykorzystaniem robotów, jak i załogowych” – dodaje Pascal Lee z Instytutu SETI, Instytutu Marsa, Ceres Robotics i Centrum Badawczego NASA Ames, który nie jest powiązany z tym badaniem.
„Ten rozwój technologii inspirowany biologią jest zarówno innowacyjny, jak i intrygujący” – Lee powiedział Space.com.
Aby uzyskać szczegółowe informacje na temat prac DLR nad łazikami, robotami gąsienicowymi i dronami na Marsie – projekt Valles Marineris Explorer, odwiedź stronę internetową projektu.



